前の10件 | -
ワイ・エム・シートメタル 東大阪の町工場で生まれたものづくり体験キット [新製品]
◆精密板金加工のワイ・エム・シートメタル(東大阪市高井田中1-2-5、森本尚敬社長)が、サイコロや貯金箱を組み立てる金属製のものづくり体験キット「小さな職人さんシリーズ 見習いさん編」3種類を4月28日から発売する。同社のサイトでインターネット販売をする。価格はそれぞれ1980円。

小さな職人さんシリーズは、A4サイズより少し小さい鋼板から切り抜いた型をプラモデルのように組み立てる工作キット。対象年齢は15歳以上。
平面展開した鋼板部品を枠からニッパーで切り出し、ヤスリをかけて滑らかにし、金づちなどで叩いて曲げ、ねじ止めなどをして、サイコロや貯金箱、ペンスタンドを完成させる。
組み立ては、ニッパーや金づち、金属用やすりなどを使い、大人でも約1時間かかり、小学生が保護者といっしょに作ると1時間半以上かかります。
今後は、難易度を高めたシリーズを順次発売する。
また「小さな職人さんシリーズ 見習いさん編」を使った、親子で参加できる工作体験会を、5月5日、東大阪で実施するという。
ワイ・エム・シートメタル
http://www.k-yms.co.jp/
http://www.k-yms.co.jp/index6.html
![電子工作マガジン 2011年 05月号 [雑誌]](https://images-fe.ssl-images-amazon.com/images/I/61jTpcGLS3L._SL160_.jpg "電子工作マガジン 2011年 05月号 [雑誌]")

小さな職人さんシリーズは、A4サイズより少し小さい鋼板から切り抜いた型をプラモデルのように組み立てる工作キット。対象年齢は15歳以上。
平面展開した鋼板部品を枠からニッパーで切り出し、ヤスリをかけて滑らかにし、金づちなどで叩いて曲げ、ねじ止めなどをして、サイコロや貯金箱、ペンスタンドを完成させる。
組み立ては、ニッパーや金づち、金属用やすりなどを使い、大人でも約1時間かかり、小学生が保護者といっしょに作ると1時間半以上かかります。
今後は、難易度を高めたシリーズを順次発売する。
また「小さな職人さんシリーズ 見習いさん編」を使った、親子で参加できる工作体験会を、5月5日、東大阪で実施するという。
ワイ・エム・シートメタル
http://www.k-yms.co.jp/
http://www.k-yms.co.jp/index6.html
- 作者:
- 出版社/メーカー: 電波新聞社
- 発売日: 2011/03/19
- メディア: 雑誌
2011-04-23 12:05
nice!(8)
東日本大震災被災地におけるロボットによる探索活動 [ロボット]
◆国際レスキューシステム研究機構(IRS)が、先頃、東日本大震災に伴って宮城県と岩手県の沿岸部で行った水中ロボットによる探索活動と、福島原子力発電所での緊急災害対応ロボットの活動についての報告会を、2011年4月24日、千葉工業大学芝園キャンパスで行う。
当日は、テキサスA&M大学のRobin Murphy(ロビン・マーフィー)教授が水中ロボットによる調査活動の報告と実機での解説を行うほか、福島原発における緊急災害対応ロボットについては東京大学の淺間一教授、東北大学の田所諭教授、千葉工業大学未来ロボット技術研究センター小柳栄次副所長が報告する。
[国際レスキューシステム研究機構]
http://www.rescuesystem.org/
当日は、テキサスA&M大学のRobin Murphy(ロビン・マーフィー)教授が水中ロボットによる調査活動の報告と実機での解説を行うほか、福島原発における緊急災害対応ロボットについては東京大学の淺間一教授、東北大学の田所諭教授、千葉工業大学未来ロボット技術研究センター小柳栄次副所長が報告する。
[国際レスキューシステム研究機構]
http://www.rescuesystem.org/
2011-04-23 11:31
nice!(1)
京都コンピュータ学院、Android携帯電話で動く4足歩行ロボットなど 卒業研究作品など優秀作品を発表 KCG AWARDS 2011 [研究・開発]
◆京都コンピュータ学院が毎年開催している学生による卒業研究作品の発表会「KCG AWARDS」が、2011年2月20日、京都市南区の同駅前校で開かれ、事前に選ばれた6作品のプレゼンテーションが行われ、優秀賞にAR(拡張現実)技術を用いたゲーム「ぼくの犬」を開発した情報学科のチームが選ばれた。ロボットや電子工作などと関係が深い情報工学科からは2チームが出場し、Android携帯電話で動く4足歩行ロボットと独自に開発したWireless Home Area Network(WiHAN)インフラを紹介した。

今回、プレゼンテーションに臨んだのは2月4日、7日に行われた卒業研究発表会で選ばれた6件の優秀作品。
情報工学科の学生によるAndroid携帯電話で動く4足歩行ロボットは、Android携帯電話の自作アプリで操作できるのが特徴。バランスよく安定して歩くことができるクロール歩容(4足のうち3足を順に後に送る事で進む歩行形態)を採用した。
サーボモーターの制御信号をハードウェア記述言語のVHDLを用いてFPGA(Field Programmable Gate Array=プログラミングすることができるLSI)で作成し、モーター動作角度のデータをマイコンから受け取り、動作モーションの追加や調整をマイコン側で行えるようにしている。
また、Wireless Home Area Network(WiHAN)インフラは、家電品などを接続する無線ネットワークインフラ。家電品をセンサーやネットワークに接続して有効利用することができるという。
これを用いることによって照明、空調など家電品の統括コントロールが可能になるほか、配線工事をしなくても検知システムを配置するだけで防犯や火災のモニタリングなどのセキュリティシステムとしての応用、高齢者や子どもの見守りなど家庭内の状況モニタリングが可能になる。
安定した通信環境が、生活の利便性を高めエネルギー利用の効率化にも役立てられるという。
◆優秀賞に選ばれた「ぼくの犬」は、ARの技術を使ってマーカーだけで入力を行うARゲーム。マウスやキーボード、コントローラーなどのインターフェースを使わずに、マーカーだけですべての処理を行えるという。
このほか、Wiiリモコンを使い実際に刀を振っているかのような操作のアクションゲーム「斬撃サバイバル」、物理法則と迫力のあるゲーム画面を提供するゲームエンジン「GLability」、介護老人ホームでの入所者の深夜徘徊を検知するための装置「徘徊検知センサー<GAIA>」

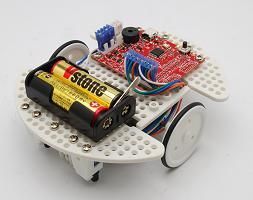
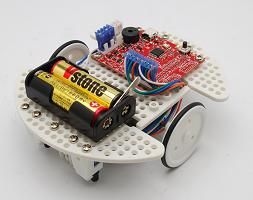
◆KCG AWARDS 2011の会場外ではプレゼンテーションの機会は与えられなかったが、学生が開発、制作した様々な作品が展示されていた。
その中にはカメラを搭載した4WS走行するカメラ搭載遠隔操作ロボット = 写真・上 = も出品されていた。市販のラジコンカーのシャーシ・駆動部を利用している。
[KCG AWARDS 2011]
http://kcg.edu/awards/index.html

今回、プレゼンテーションに臨んだのは2月4日、7日に行われた卒業研究発表会で選ばれた6件の優秀作品。
情報工学科の学生によるAndroid携帯電話で動く4足歩行ロボットは、Android携帯電話の自作アプリで操作できるのが特徴。バランスよく安定して歩くことができるクロール歩容(4足のうち3足を順に後に送る事で進む歩行形態)を採用した。
サーボモーターの制御信号をハードウェア記述言語のVHDLを用いてFPGA(Field Programmable Gate Array=プログラミングすることができるLSI)で作成し、モーター動作角度のデータをマイコンから受け取り、動作モーションの追加や調整をマイコン側で行えるようにしている。
Android携帯電話で動く4足歩行ロボットのプレゼンテーション
また、Wireless Home Area Network(WiHAN)インフラは、家電品などを接続する無線ネットワークインフラ。家電品をセンサーやネットワークに接続して有効利用することができるという。
これを用いることによって照明、空調など家電品の統括コントロールが可能になるほか、配線工事をしなくても検知システムを配置するだけで防犯や火災のモニタリングなどのセキュリティシステムとしての応用、高齢者や子どもの見守りなど家庭内の状況モニタリングが可能になる。
安定した通信環境が、生活の利便性を高めエネルギー利用の効率化にも役立てられるという。
Wireless Home Area Network(WiHAN)インフラのプレゼンテーション
◆優秀賞に選ばれた「ぼくの犬」は、ARの技術を使ってマーカーだけで入力を行うARゲーム。マウスやキーボード、コントローラーなどのインターフェースを使わずに、マーカーだけですべての処理を行えるという。
このほか、Wiiリモコンを使い実際に刀を振っているかのような操作のアクションゲーム「斬撃サバイバル」、物理法則と迫力のあるゲーム画面を提供するゲームエンジン「GLability」、介護老人ホームでの入所者の深夜徘徊を検知するための装置「徘徊検知センサー<GAIA>」
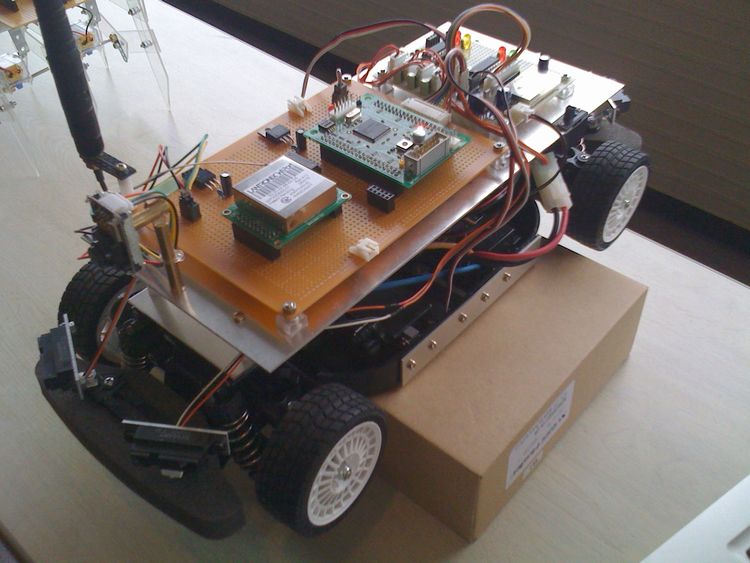
◆KCG AWARDS 2011の会場外ではプレゼンテーションの機会は与えられなかったが、学生が開発、制作した様々な作品が展示されていた。
その中にはカメラを搭載した4WS走行するカメラ搭載遠隔操作ロボット = 写真・上 = も出品されていた。市販のラジコンカーのシャーシ・駆動部を利用している。
[KCG AWARDS 2011]
http://kcg.edu/awards/index.html
世界初!! 2足歩行ロボットがフルマラソンに挑戦 24日、大阪・ATCでスタート [ロボコン]
◆2足歩行ロボットが世界で初めてフルマラソンに挑戦する。2011年2月24日、大阪市住之江区のATC(アジアトレードセンター)ITM棟11階にあるエイジレスセンターに特設会場を設けて、4台の2足歩行ロボットが約4日間をかけて42.195Kmのコースを走る。レースの模様は一緒に走るロボットEVがUSTREAMで中継・配信する。
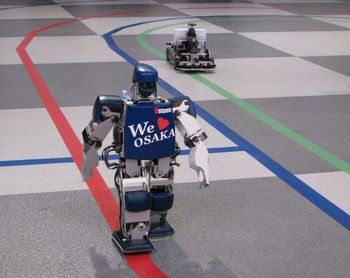
42.195Kmの完走を目指す
大阪府(大阪労働協会)とヴイストンが主催する「ろぼまらフル」。
大阪府の人材育成事業の一環として開催される。ロボット産業や新エネルギー分野で活躍できるきっかけ作りと、子どもたちにはモノづくりへの関心を持ってもらうというもの。
1周100mのコースを442周(最終周は95m)を走り、着順を競う。ロボットは無線かは問わないが、同じロボット1台で完走を目指す。
レースの途中、バッテリーなど部品交換やメンテナンスのためのピックアップは認められており、このメンテナンスを含めた全体の時間を競う。
ろぼまらフルに参加するロボットはヴイストンの「Robovie-PC」(HHTバージョン)と大阪工業大学AはRobovie-2000をベースにした「試作2号」が2台、大阪労働協会雇用創出チームは「Robovie-X Lite」。
それにヴイストンからは中継用としてロボットEV「ビュートEV」が1台出場する。
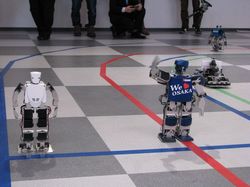

ヴイストンのRobovie-PCは体長395mm、体重約2.4Kg。軸数は20。小型カメラと小型PCを搭載しており、カメラを使った自律歩行を行うという。
大阪工業大学Aの試作2号は体長が340mm、体重約1.4Kg。軸数は12。24時間徒競争の実績を持つRobovie-2000をベースに改造し、安定歩行を実現した。
また大阪労働協会のRobovie-X Liteは、体長が343mm、体重約1.3Kg。軸数は13。市販のロボットキットで参加。3月12日にクリエイティブセンター大阪で開かれる「ロボマラソンin大阪」 http://www.pref.osaka.jp/hodo/index.php?site=fumin&pageId=6040 にも出場する。
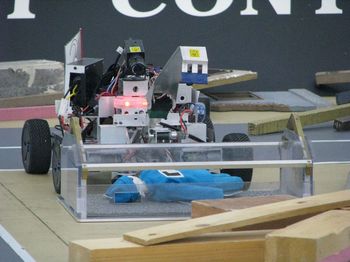
 ロボット中継車の「ビュートEV」
ロボット中継車の「ビュートEV」
中継車の「ビュートEV」は、10分の1スケールの小型電気自動車。小型ノートPCやWebカメラなどを搭載し、2足歩行ロボットの走る様子をカメラ撮影して、映像を24時間インターネットで配信し、USTREAMで中継する。
◆2足歩行ロボットのフルマラソンなんていまだかつて試みられたことはなかっただけに、果たして完走できるのか、すべてが未知数だ。
主催者側では「体長が30~40cmのロボットが42.195Kmを走るのは、かなり過酷な」と話している。
ロボットに搭載するバッテリーは30分が限度だ。そのたびにピットインして交換しなくてはならない。しかも各チームが心配するのはサーボモーターの耐性だ。
ロボットに小型PCを搭載するヴイストンチームは「真っ先に壊れるのはサーボモーターだろうし、ギアが磨耗して外れるということも想定されます。早い段階でサーボモーターを交換する必要があるかもしれません。PCが壊れないことも祈りたいです」と話している。
このチームのロボットは全身にスポンジを貼り付けて振動や衝撃に耐えられるように工夫しているほか、バランス良く走行できるようにも気を使う。
大阪労働協会は「サーボモーターもさることながら、チームの人間の耐久性も試される」と、心配している。
いずれにしても「ロボット業界にとっては歴史に残るイベント」(ヴイストン)であることに違いなく、「今の技術水準ならば十分に挑戦できるし、もし失敗したとしても次のステップにつなげたい」と、同社では話していた。
◆ロボットのフルマラソンが行われている2月26、27の両日には、午後1時から3時まで、小学生を対象にした電子工作教室が開催される。
ソーラーバッテリーを使ってエコ関連のキット作りに挑む。

42.195Kmの完走を目指す
大阪府(大阪労働協会)とヴイストンが主催する「ろぼまらフル」。
大阪府の人材育成事業の一環として開催される。ロボット産業や新エネルギー分野で活躍できるきっかけ作りと、子どもたちにはモノづくりへの関心を持ってもらうというもの。
1周100mのコースを442周(最終周は95m)を走り、着順を競う。ロボットは無線かは問わないが、同じロボット1台で完走を目指す。
レースの途中、バッテリーなど部品交換やメンテナンスのためのピックアップは認められており、このメンテナンスを含めた全体の時間を競う。
ろぼまらフルに参加するロボットはヴイストンの「Robovie-PC」(HHTバージョン)と大阪工業大学AはRobovie-2000をベースにした「試作2号」が2台、大阪労働協会雇用創出チームは「Robovie-X Lite」。
それにヴイストンからは中継用としてロボットEV「ビュートEV」が1台出場する。


写真・右=出場チームの代表者とロボット
ヴイストンのRobovie-PCは体長395mm、体重約2.4Kg。軸数は20。小型カメラと小型PCを搭載しており、カメラを使った自律歩行を行うという。
大阪工業大学Aの試作2号は体長が340mm、体重約1.4Kg。軸数は12。24時間徒競争の実績を持つRobovie-2000をベースに改造し、安定歩行を実現した。
また大阪労働協会のRobovie-X Liteは、体長が343mm、体重約1.3Kg。軸数は13。市販のロボットキットで参加。3月12日にクリエイティブセンター大阪で開かれる「ロボマラソンin大阪」 http://www.pref.osaka.jp/hodo/index.php?site=fumin&pageId=6040 にも出場する。

中継車の「ビュートEV」は、10分の1スケールの小型電気自動車。小型ノートPCやWebカメラなどを搭載し、2足歩行ロボットの走る様子をカメラ撮影して、映像を24時間インターネットで配信し、USTREAMで中継する。
◆2足歩行ロボットのフルマラソンなんていまだかつて試みられたことはなかっただけに、果たして完走できるのか、すべてが未知数だ。
主催者側では「体長が30~40cmのロボットが42.195Kmを走るのは、かなり過酷な」と話している。
ロボットに搭載するバッテリーは30分が限度だ。そのたびにピットインして交換しなくてはならない。しかも各チームが心配するのはサーボモーターの耐性だ。
ロボットに小型PCを搭載するヴイストンチームは「真っ先に壊れるのはサーボモーターだろうし、ギアが磨耗して外れるということも想定されます。早い段階でサーボモーターを交換する必要があるかもしれません。PCが壊れないことも祈りたいです」と話している。
このチームのロボットは全身にスポンジを貼り付けて振動や衝撃に耐えられるように工夫しているほか、バランス良く走行できるようにも気を使う。
大阪労働協会は「サーボモーターもさることながら、チームの人間の耐久性も試される」と、心配している。
いずれにしても「ロボット業界にとっては歴史に残るイベント」(ヴイストン)であることに違いなく、「今の技術水準ならば十分に挑戦できるし、もし失敗したとしても次のステップにつなげたい」と、同社では話していた。
◆ロボットのフルマラソンが行われている2月26、27の両日には、午後1時から3時まで、小学生を対象にした電子工作教室が開催される。
ソーラーバッテリーを使ってエコ関連のキット作りに挑む。
第3回八尾ロボットコンテスト 小学生など11チームが参加 ロボットと環境をテーマに将来のお茶の水博士たちがロボット技術を競う [ロボコン]
◆将来のモノ作りやエレクトロニクス技術を支える子どもたちを育てようと第3回八尾ロボットコンテスト(主催・八尾経営技術交流会=マテック八尾)が、2011年2月12日、大阪府八尾市のショッピングセンター、アリオ八尾1階のイベント広場で開かれた。09年から毎年行われているもので、今回は八尾に生息するニッポンバラタナゴという小さな淡水魚を絶滅から救うために、天敵のブルーギル、アメリカザリガニやヘドロに見立てたポールを川ゾーンから取り除き、成長に欠かせないドブ貝やヨシノボリを川ゾーンへ移す作業をロボットによって行った。3分間の競技時間内に移動させたポールの数を競った。マテック八尾に加入する企業と小学生たちが一緒に作ったロボットで参加したトーナメントA、大学生などのチームからなるトーナメントBに別れて競技が行われた。ペルーからも大学生が2年連続で出場した。


トーナメントAに参加したのは「河内のQ太郎」「スーパーあさきち」「若ごぼう」「オヤクッテマーズクッテマン」「えだまめ君」の5チーム。
いずれもマテック八尾ロボット分科会のメンバー企業が中核になり、それぞれ小学生が3、4人加わって、コンテストに出場するロボット作りから携わっている。
また小学生たちは昨年から同分科会が開催してきた連続ロボット教室で、ロボットの基礎から学んできた。
一方、トーナメントBには、「マスターONO with FDK ゆき坊」「金物語 FDKクラブ」「テクフリルーキーズ Carry003」「大阪工業大学エンジュニアA」「大阪工業大学エンジュニアB」「クラブ・デ・ロボティカ USMP ナイランブ」の6チームが出場した。
ナイランブはペルーの大学(USMP)から2年連続で出場したチーム。
このロボコンでは、毎回新たなテーマが設けられている。今回は「救え!ニッポンバラタナゴ」のタイトル通りに、自ら製作したロボットで絶滅が心配される魚が生息できる環境を作り出そう、というもの。
競技は陸地ゾーンと川ゾーンに段差で分かれたコートで、2チーム対抗で制限時間の3分間で競われた。川ゾーンから有害な魚などを取り除き、ニッポンバラタナゴの生息に良いとされているドブ貝などと入れ替えて環境を良くしていく。
競技開始に先だって田中誠太八尾市長が「環境とロボットというキーワードで、子どもたちのモノ作りの夢を実現させるとともに、八尾の技術の高さを世界にアピールしたい」と、開会のあいさつ。
オヤクッテマーズクッテマンチームに所属する八尾市立長畑小学校5年の越智友規君が「ロボット連続教室で学んだ技術を生かして正々堂々と戦います」と選手宣誓した。
このあと競技の説明が行われ、第1試合では「河内のQ太郎」対「えだまめ君」の対戦が行われ、トーナメントA、同Bの合計9試合が行われた。
トーナメントAの決勝は「若ごぼう」と「えだまめ君」の間で行われたが、45対45の同点で1分間の延長戦に突入した。
その結果、総合点で60点を取った「若ごぼう」が、「えだまめ君」を5点差で退けて優勝した。若ごぼうチームは勝因を「チームワークにあると思います」と冷静に分析していた。

また、準優勝のえだまめ君チームは「悔しいです。でも精一杯がんばりました。20センチの段差を乗り越えるのが難しかったです」と、話していた。
トーナメントBでは、第1試合の「ナイランブ」対「金物語 FDKクラブ」はナイランプの不戦勝になったが、ナイランプは模擬演技を行い「1日12時間の練習を積んで臨んだ」というだけあって、早いスピードでポールを入れ替えていた。
決勝にはこの「ナイランプ」が進出し、「大阪工業大学エンジュニアA」と戦ったが、50対80で負けてしまった。このトーナメントで2位になったナイランプは「すばらしい大会に参加できてうれしい。一生忘れないと思う」と話していた。
優勝した大阪工業大学エンジュニアAチームは、決勝前の第3試合で85点の満点を獲得するなど、各試合で高得点を記録していた。
その秘密は1台のロボットに4つのアームを搭載しており、一度に4つのポールをつかむことができるところにあった。最初に製作したロボットは規格以上大きすぎたことから、急きょ作り直し、出場したのは2台目のロボットだった。
A、Bのトーナメント戦のあと、それぞれの勝者によるエキビジション戦が行われた。これは「大阪工業大学エンジュニアA」が75対50で勝つなど、この日、立てつづけに3試合すべてに勝利し、「最高にうれしいです。しかし、トーナメントBの決勝ではつまらないミスをしてしまって満点を取れなかったのは残念です」と語っていた。
トーナメントAのチームには、準優勝の「えだまめ君」ほか、アイデア賞が「河内のQ太郎」に、技術賞は「若ごぼう」、審査員長賞が「オヤクッテマーズクッテマン」にそれぞれ贈られた。
 奈良工業高等専門学校の早川恭弘教授は、試合を総括して「テーマは今までよれも難しくなっていた。若ごぼうチームはロボットの車輪にオムニホイールを4つ採用して、前後左右に移動できるようにしていた。それをバランスよく操縦していたのが光った。また親ロボットにエレベーターを採用して子ロボットを運んだのは良く考えていた」と、トーナメントAの優勝チームで、併せて技術賞も獲得した「若こぼう」チームを称えた。
奈良工業高等専門学校の早川恭弘教授は、試合を総括して「テーマは今までよれも難しくなっていた。若ごぼうチームはロボットの車輪にオムニホイールを4つ採用して、前後左右に移動できるようにしていた。それをバランスよく操縦していたのが光った。また親ロボットにエレベーターを採用して子ロボットを運んだのは良く考えていた」と、トーナメントAの優勝チームで、併せて技術賞も獲得した「若こぼう」チームを称えた。
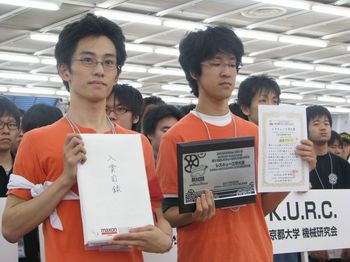
また、主催者を代表してマテック八尾ロボット分科会のたくみ精密板金製作所製造部長鈴木謙三さん = 写真・左 = は「参加したチームは前日は徹夜してロボットの調整を行いコンテストに臨みました。トーナメントBで準優勝したペルーのナイランプも最後まで調整をしていました。私たちは諦めずに挑戦し続けることで成果を得られることを体感しました。来年のロボットコンテストは、ペルーからの2年連続出場を称えて、ペルーに因んだテーマを考えていきたい」と、話していた。

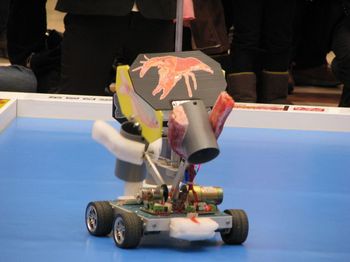
大賞を受賞した小林さん(左)と藤原電子工業の藤原社長 中央のロボットは小林さんがデザインし、藤原電子工業が製作したRURO
こんなロボットがあったらいいな―。
八尾市内の小学生から募集したロボットのデザインの中から最もアイデアに優れた「子ども夢実現大賞」が、田中誠太八尾市長から留守番ロボット「RURO」を描いた同市立大正北小学校5年の小林瑞季さんに贈られた。デザイン画のロボットは、マテック八尾ロボット分科会のメンバー企業、藤原電子工業(八尾市、藤原義春社長)が動くロボットとして製作し、12日、第3回八尾ロボットコンテストのオープニングセレモニーで披露した。
子ども夢実現プロジェクトとして1618人の児童から応募があった。
大賞に選ばれた小林さんが描いたのは、来客があると「誰れですか」と尋ねたり、新聞や郵便物を取ってくれる。さらには泥棒が入るとロボットの頭の上にある回転灯が光ってサイレンを鳴らすという仕組みの留守番ロボットだ。
名前の「RURO」も、ルスバン・ロボットの頭文字を取って名づけたという。
発話機能もあって「こんにちは、留守番ロボットのRUROです」と話す。
セレモニーでは田中市長から表彰状と副賞のロボットが贈られた。大賞以外に優秀賞、アイデア賞、ユニーク賞なども選ばれた。



トーナメントAに参加したのは「河内のQ太郎」「スーパーあさきち」「若ごぼう」「オヤクッテマーズクッテマン」「えだまめ君」の5チーム。
いずれもマテック八尾ロボット分科会のメンバー企業が中核になり、それぞれ小学生が3、4人加わって、コンテストに出場するロボット作りから携わっている。
また小学生たちは昨年から同分科会が開催してきた連続ロボット教室で、ロボットの基礎から学んできた。
一方、トーナメントBには、「マスターONO with FDK ゆき坊」「金物語 FDKクラブ」「テクフリルーキーズ Carry003」「大阪工業大学エンジュニアA」「大阪工業大学エンジュニアB」「クラブ・デ・ロボティカ USMP ナイランブ」の6チームが出場した。
ナイランブはペルーの大学(USMP)から2年連続で出場したチーム。
このロボコンでは、毎回新たなテーマが設けられている。今回は「救え!ニッポンバラタナゴ」のタイトル通りに、自ら製作したロボットで絶滅が心配される魚が生息できる環境を作り出そう、というもの。
競技は陸地ゾーンと川ゾーンに段差で分かれたコートで、2チーム対抗で制限時間の3分間で競われた。川ゾーンから有害な魚などを取り除き、ニッポンバラタナゴの生息に良いとされているドブ貝などと入れ替えて環境を良くしていく。
工夫凝らしたロボットが勢揃い
競技開始に先だって田中誠太八尾市長が「環境とロボットというキーワードで、子どもたちのモノ作りの夢を実現させるとともに、八尾の技術の高さを世界にアピールしたい」と、開会のあいさつ。
オヤクッテマーズクッテマンチームに所属する八尾市立長畑小学校5年の越智友規君が「ロボット連続教室で学んだ技術を生かして正々堂々と戦います」と選手宣誓した。
このあと競技の説明が行われ、第1試合では「河内のQ太郎」対「えだまめ君」の対戦が行われ、トーナメントA、同Bの合計9試合が行われた。
トーナメントAの決勝は「若ごぼう」と「えだまめ君」の間で行われたが、45対45の同点で1分間の延長戦に突入した。
その結果、総合点で60点を取った「若ごぼう」が、「えだまめ君」を5点差で退けて優勝した。若ごぼうチームは勝因を「チームワークにあると思います」と冷静に分析していた。


また、準優勝のえだまめ君チームは「悔しいです。でも精一杯がんばりました。20センチの段差を乗り越えるのが難しかったです」と、話していた。
トーナメントBでは、第1試合の「ナイランブ」対「金物語 FDKクラブ」はナイランプの不戦勝になったが、ナイランプは模擬演技を行い「1日12時間の練習を積んで臨んだ」というだけあって、早いスピードでポールを入れ替えていた。
決勝にはこの「ナイランプ」が進出し、「大阪工業大学エンジュニアA」と戦ったが、50対80で負けてしまった。このトーナメントで2位になったナイランプは「すばらしい大会に参加できてうれしい。一生忘れないと思う」と話していた。
優勝した大阪工業大学エンジュニアAチームは、決勝前の第3試合で85点の満点を獲得するなど、各試合で高得点を記録していた。
その秘密は1台のロボットに4つのアームを搭載しており、一度に4つのポールをつかむことができるところにあった。最初に製作したロボットは規格以上大きすぎたことから、急きょ作り直し、出場したのは2台目のロボットだった。
最後まであきらめないで挑戦を 来年はペルーにちなんだ競技テーマに
A、Bのトーナメント戦のあと、それぞれの勝者によるエキビジション戦が行われた。これは「大阪工業大学エンジュニアA」が75対50で勝つなど、この日、立てつづけに3試合すべてに勝利し、「最高にうれしいです。しかし、トーナメントBの決勝ではつまらないミスをしてしまって満点を取れなかったのは残念です」と語っていた。
トーナメントAのチームには、準優勝の「えだまめ君」ほか、アイデア賞が「河内のQ太郎」に、技術賞は「若ごぼう」、審査員長賞が「オヤクッテマーズクッテマン」にそれぞれ贈られた。
 奈良工業高等専門学校の早川恭弘教授は、試合を総括して「テーマは今までよれも難しくなっていた。若ごぼうチームはロボットの車輪にオムニホイールを4つ採用して、前後左右に移動できるようにしていた。それをバランスよく操縦していたのが光った。また親ロボットにエレベーターを採用して子ロボットを運んだのは良く考えていた」と、トーナメントAの優勝チームで、併せて技術賞も獲得した「若こぼう」チームを称えた。
奈良工業高等専門学校の早川恭弘教授は、試合を総括して「テーマは今までよれも難しくなっていた。若ごぼうチームはロボットの車輪にオムニホイールを4つ採用して、前後左右に移動できるようにしていた。それをバランスよく操縦していたのが光った。また親ロボットにエレベーターを採用して子ロボットを運んだのは良く考えていた」と、トーナメントAの優勝チームで、併せて技術賞も獲得した「若こぼう」チームを称えた。また、主催者を代表してマテック八尾ロボット分科会のたくみ精密板金製作所製造部長鈴木謙三さん = 写真・左 = は「参加したチームは前日は徹夜してロボットの調整を行いコンテストに臨みました。トーナメントBで準優勝したペルーのナイランプも最後まで調整をしていました。私たちは諦めずに挑戦し続けることで成果を得られることを体感しました。来年のロボットコンテストは、ペルーからの2年連続出場を称えて、ペルーに因んだテーマを考えていきたい」と、話していた。
ロボットのアイデア募集に1618人応募
「夢実現大賞」に小学5年の小林瑞季さん

大賞を受賞した小林さん(左)と藤原電子工業の藤原社長 中央のロボットは小林さんがデザインし、藤原電子工業が製作したRURO
こんなロボットがあったらいいな―。
八尾市内の小学生から募集したロボットのデザインの中から最もアイデアに優れた「子ども夢実現大賞」が、田中誠太八尾市長から留守番ロボット「RURO」を描いた同市立大正北小学校5年の小林瑞季さんに贈られた。デザイン画のロボットは、マテック八尾ロボット分科会のメンバー企業、藤原電子工業(八尾市、藤原義春社長)が動くロボットとして製作し、12日、第3回八尾ロボットコンテストのオープニングセレモニーで披露した。
子ども夢実現プロジェクトとして1618人の児童から応募があった。
大賞に選ばれた小林さんが描いたのは、来客があると「誰れですか」と尋ねたり、新聞や郵便物を取ってくれる。さらには泥棒が入るとロボットの頭の上にある回転灯が光ってサイレンを鳴らすという仕組みの留守番ロボットだ。
名前の「RURO」も、ルスバン・ロボットの頭文字を取って名づけたという。
発話機能もあって「こんにちは、留守番ロボットのRUROです」と話す。
セレモニーでは田中市長から表彰状と副賞のロボットが贈られた。大賞以外に優秀賞、アイデア賞、ユニーク賞なども選ばれた。
- 作者: でんご つねお
- 出版社/メーカー: リベルタ出版
- 発売日: 2011/02/04
- メディア: 単行本
三菱電機 福山製作所にロボット85台を導入、最新鋭の遮断器生産ラインを稼働 [生産ライン]
◆三菱電機が、福山製作所(広島県福山市)の新形ノーヒューズ遮断器・漏電遮断器WS-V(World Super V)シリーズの生産ラインに最新鋭のiQ Platform対応多関節型ロボット85台を導入し、2011年1月から稼働する。

ロボットを導入した三菱電機福山製作所の新生産ライン
これによって、これまで自動組み立てが困難だった機構部も含め、全工程の自動化を実現した。製品の生産期間を5日から1日に短縮し、短納期化とともに生産能力を年間300万台から480万台へ高める計画だ。
また、ロボットは安全シーケンサによるフェールセーフ機能や自己診断機能を持たせることで、生産ラインの安全制御を可能にしている。
約40%の省人化と省スペース化を実現している。

ロボットを導入した三菱電機福山製作所の新生産ライン
これによって、これまで自動組み立てが困難だった機構部も含め、全工程の自動化を実現した。製品の生産期間を5日から1日に短縮し、短納期化とともに生産能力を年間300万台から480万台へ高める計画だ。
また、ロボットは安全シーケンサによるフェールセーフ機能や自己診断機能を持たせることで、生産ラインの安全制御を可能にしている。
約40%の省人化と省スペース化を実現している。
ヴイストン、ARMマイコン搭載プログラミング教材ロボット「ビュート ローバーARM」発売 [新製品]
◆ヴイストン(大阪市西淀川区、大和信夫社長)が、2010年12月10日、プログラミングとものづくり教材「ビュートローバー(BeautoRover)」の新機種「ビュートローバーARM(アーム)」を発売したと発表した。
ビュートローバーARMは、CPUボード「VS-WRC103LV」に、NXPセミコンダクターズ社製のCortexM3コアを採用した32ビットARMマイコンLPC1343」(72MHz)を搭載。LED、モータ、センサ入力も備え、単体でもプログラミング学習が可能だ。
ARMマイコンのC言語組込プログラムのほか、専用プログラムソフトウェア「ビュートビルダー2(Beauto Builder2)」を用いることで、フローチャートによってブロックを置くだけでプログラムが可能だ。
C言語学習には、無償の開発環境LPCXpresso やデバッガとしてLPC-LIN が利用でき、同社が公開しているサンプルコードや、入門向けのテキスト(2011年出版予定)を使って、ARMマイコンの組み込みプログラミング学習が行える。
センサ・モータを増設できるI/O 拡張ボード、大電流モータが接続可能なモータアンプボード、高度なライントレースを可能にする8連赤外線センサボード、遠隔でロボットを操縦するための無線操縦セット、ロータリーエンコーダ拡張セットなども用意されている。
同社のWebショップとヴイストンロボットセンター(福岡ロボスクエア店、東京秋葉原店)のほか、アールティ http://www.rt-net.jp/ 秋月電子通商 http://akizukidenshi.com/ イスペット http://www.isupet.co.jp/ キクイチ http://www.kk-kikuichi.com/ ツクモロボット王国 http://robot.tsukumo.co.jp/ テクノロジア http://www.technologia.co.jp/ トップマン http://www.topman.co.jp/ 日本科学未来館 http://www.miraikan.jst.go.jp/ ロボベース http://www.robo-base.com/ でも販売する。
[ヴイストン・ビュートローバーARM]
http://www.vstone.co.jp/robot/rover/
ビュートローバーARMは、CPUボード「VS-WRC103LV」に、NXPセミコンダクターズ社製のCortexM3コアを採用した32ビットARMマイコンLPC1343」(72MHz)を搭載。LED、モータ、センサ入力も備え、単体でもプログラミング学習が可能だ。
ARMマイコンのC言語組込プログラムのほか、専用プログラムソフトウェア「ビュートビルダー2(Beauto Builder2)」を用いることで、フローチャートによってブロックを置くだけでプログラムが可能だ。
C言語学習には、無償の開発環境LPCXpresso やデバッガとしてLPC-LIN が利用でき、同社が公開しているサンプルコードや、入門向けのテキスト(2011年出版予定)を使って、ARMマイコンの組み込みプログラミング学習が行える。
センサ・モータを増設できるI/O 拡張ボード、大電流モータが接続可能なモータアンプボード、高度なライントレースを可能にする8連赤外線センサボード、遠隔でロボットを操縦するための無線操縦セット、ロータリーエンコーダ拡張セットなども用意されている。
同社のWebショップとヴイストンロボットセンター(福岡ロボスクエア店、東京秋葉原店)のほか、アールティ http://www.rt-net.jp/ 秋月電子通商 http://akizukidenshi.com/ イスペット http://www.isupet.co.jp/ キクイチ http://www.kk-kikuichi.com/ ツクモロボット王国 http://robot.tsukumo.co.jp/ テクノロジア http://www.technologia.co.jp/ トップマン http://www.topman.co.jp/ 日本科学未来館 http://www.miraikan.jst.go.jp/ ロボベース http://www.robo-base.com/ でも販売する。
[ヴイストン・ビュートローバーARM]
http://www.vstone.co.jp/robot/rover/
第10回レスキューロボットコンテスト 大阪電通大「救命ゴリラ!S」チームがレスキュー工学大賞 [ロボコン]
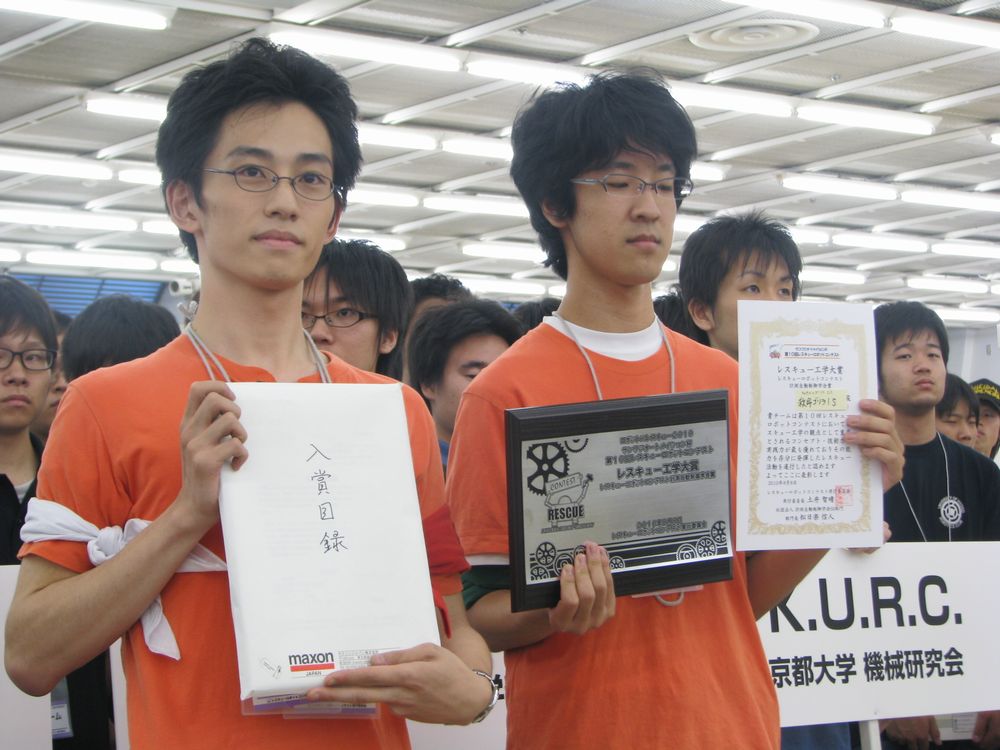
◆第10回レスキューロボットコンテストが、2010年8月8日、神戸・三宮の神戸サンボーホールで開かれた。レスキュー工学大賞に大阪電通大自由工房の救命ゴリラ!S。ベストパフォーマンス賞と競基弘賞に同Bが選ばれた。唯一の高校チーム、大阪•都島工業高校機械電機科はベストプレゼンテーション賞を受賞した。
ロボットによる被害者(ダミヤン)の救出
 レスキュー工学大賞に選ばれた大阪電通大自由工房の救命ゴリラ!Sチーム
レスキュー工学大賞に選ばれた大阪電通大自由工房の救命ゴリラ!Sチーム
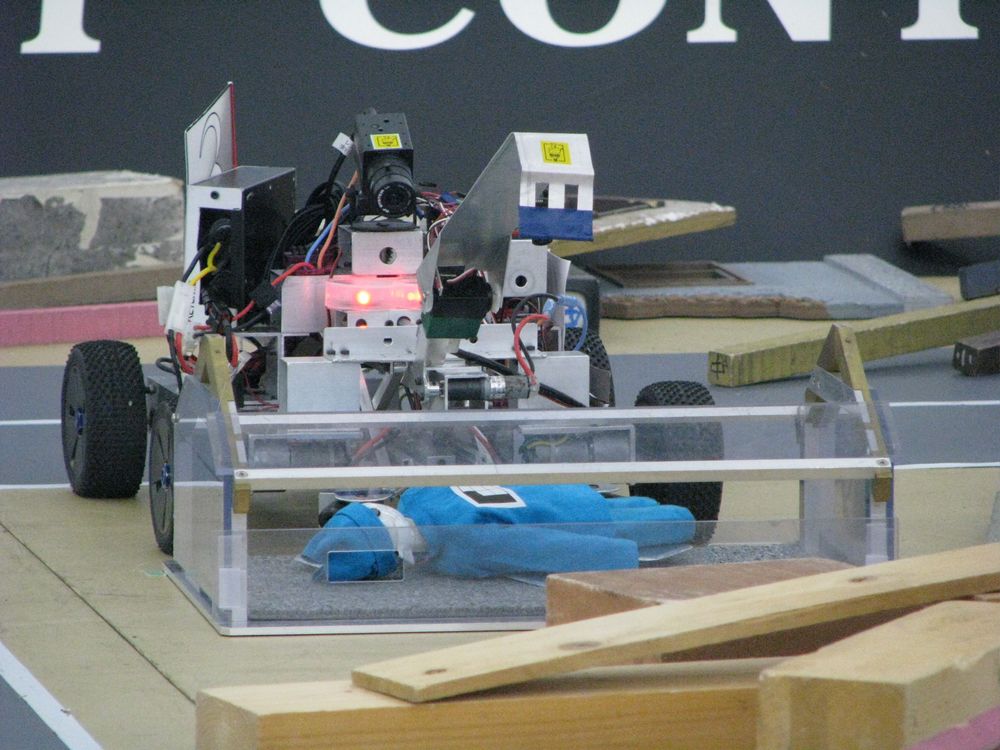
ロボットによる被害者(ダミヤン)の救出
イーガー 10月から遠隔操作アンドロイド「アバタント」を発売 離れて暮らす老人と会話ができる [新製品]
◆外国に住む教師による語学学習を受けたり、離れて暮らす独居老人との会話などロボットとインターネット回線を使って、あたかも相手が近くにいるかのようなサービスが提供できるロボット「アバタント」が、家電向け組込みソフトの開発やロボット開発を手掛けているイーガー(大阪市北区、穴釜敬志社長)から、今年10月に発売される。

 開発者の大阪大学の石黒浩教授とテレノイド
開発者の大阪大学の石黒浩教授とテレノイド
アバタントは、人間に近い姿をした遠隔操作で相手と会話ができるロボット「ジェミノイド」などを開発している大阪大学の石黒浩教授によって開発された「テレノイド」を使っている。
研究用の「R1」と一般向けの「P1」の2タイプがある。
R1は外皮にシリコンを用いているのに対して、P1は布を使っているほか、動作箇所がR1のほうが多い。また、重さはR1が約5Kgで、P1が約4Kgといった点などが違う。全長はどちらも80cm。
形は乳児のような姿をしているが、足がないなど「最小限人間を感じさせられるところまで形をそぎ落とした」(石黒教授)といい、両腕はあるが足は1本だけ。
しかもいずれも指はないといった独特なデザインである。
開発者の石黒教授は「対話することによってロボットに引き込まれ、デザインに違和感はないはず。むしろ世の中に出すことによって、評価されていくだろう」と話している。
大学・研究機関や介護施設、教育機関などへ販売され、価格はR1が約300万円、P1が約70万円。
アバタントは、遠隔地にあるパソコンから目、口、首、手を動かせる。操作者の声は本体に内蔵されたスピーカーを通して伝わるようになっている。
ロボットと面している利用者の姿は、部屋に設置されたカメラによって全体像がパソコンの画面に映し出される。
双方はアバタントを介して、あたかも対面しているかのように対話ができるようになっている。
 これらは石黒教授が、今までにジェミノイドなどで実証してきており、アバタントはそれを応用したものだ。
これらは石黒教授が、今までにジェミノイドなどで実証してきており、アバタントはそれを応用したものだ。
たとえば語学学習の場合、教師は海外など遠く離れた場所に居ながら、生徒と会話練習ができる。
生徒はアバタントから発せられる教師の声を聴きながら、学習ができるという仕組みだ。
生徒からは教師の顔は見えないが、普段から身近にいるアバタントの表情の変化や口の動きなど身振りを見ながら会話ができる。
これは将来のポスト・モバイルの代表商品に育つ可能性を秘めており、石黒教授たちはアバタント(テレノイド)を「携帯電話に代わる新たなコミュニケーションツールになる」と期待している。
[イーガー]
http://www.eager.co.jp/


アバタントは、人間に近い姿をした遠隔操作で相手と会話ができるロボット「ジェミノイド」などを開発している大阪大学の石黒浩教授によって開発された「テレノイド」を使っている。
研究用の「R1」と一般向けの「P1」の2タイプがある。
R1は外皮にシリコンを用いているのに対して、P1は布を使っているほか、動作箇所がR1のほうが多い。また、重さはR1が約5Kgで、P1が約4Kgといった点などが違う。全長はどちらも80cm。
形は乳児のような姿をしているが、足がないなど「最小限人間を感じさせられるところまで形をそぎ落とした」(石黒教授)といい、両腕はあるが足は1本だけ。
しかもいずれも指はないといった独特なデザインである。
開発者の石黒教授は「対話することによってロボットに引き込まれ、デザインに違和感はないはず。むしろ世の中に出すことによって、評価されていくだろう」と話している。
大学・研究機関や介護施設、教育機関などへ販売され、価格はR1が約300万円、P1が約70万円。
アバタントは、遠隔地にあるパソコンから目、口、首、手を動かせる。操作者の声は本体に内蔵されたスピーカーを通して伝わるようになっている。
ロボットと面している利用者の姿は、部屋に設置されたカメラによって全体像がパソコンの画面に映し出される。
双方はアバタントを介して、あたかも対面しているかのように対話ができるようになっている。
 これらは石黒教授が、今までにジェミノイドなどで実証してきており、アバタントはそれを応用したものだ。
これらは石黒教授が、今までにジェミノイドなどで実証してきており、アバタントはそれを応用したものだ。たとえば語学学習の場合、教師は海外など遠く離れた場所に居ながら、生徒と会話練習ができる。
生徒はアバタントから発せられる教師の声を聴きながら、学習ができるという仕組みだ。
生徒からは教師の顔は見えないが、普段から身近にいるアバタントの表情の変化や口の動きなど身振りを見ながら会話ができる。
これは将来のポスト・モバイルの代表商品に育つ可能性を秘めており、石黒教授たちはアバタント(テレノイド)を「携帯電話に代わる新たなコミュニケーションツールになる」と期待している。
[イーガー]
http://www.eager.co.jp/
日本橋ロボ連、7月例会開催 インターグループ ロボットのファッションショー 「ROBOT FASHION CONTEST」をアピール [ロボコン]
◆日本橋でんでんタウンロボット連絡会(代表幹事・蝉正敏ダイセン電子工業社長)が、2010年7月20日、大阪・日本橋3のダイセン電子工業で7月例会を開いた。インターグループ(大阪市北区、小谷寿平社長)でロボット事業などを担当する加味昇がゲスト参加し、今年10月に大阪・船場で開かれる「ROBOT FASHION CONTEST」をアピールした。

ROBOT FASHION CONTESTは国内初のロボットによるファッションショー。
10月10日に大阪市船場地区で繰り広げられる第2回船場まつりの一環として、ロボットによるファッションコンテスト。
ロボットに衣装を着せて、そのパフォーマンス振りを競おうというもので、審査員には浅田稔大阪大学大学院教授やファッションデザイナーのコシノヒロコさん、ロボットクリエイターの高橋智隆さんらを予定している。
総合優勝ロボットには賞金50万円が贈られる。またロボットの性能を競うロボット部門の優秀ロボットには20万円、ファッション性が高いロボットにも20万円が渡されることになっている。
加味さんによると、20~30チームが参加するものとみられ「今後は船場まつりのイベントとして継続していきたい」と話している。
このほかにも、ロボット数メートルのカーペット上を歩く「ロボットパレード」や、京都大学総合人間学部講師の北原達正さんが講師を務めるパソコンで自律ロボットのプログラミングを行う「ロボット研究室」も行われる。
◆例会では、このほか6月にシンガポールで行われたロボカップ世界大会で優勝した堀川由人さん、坂本智希さんの活躍ぶりを写真を交えて紹介された。2人は、いずれも日本橋ロボット教室の出身者だという。
[第 2回船場まつり ロボット・ファッションコンテスト]
http://www.intergroup.jp/~conv/semba/

ROBOT FASHION CONTESTは国内初のロボットによるファッションショー。
10月10日に大阪市船場地区で繰り広げられる第2回船場まつりの一環として、ロボットによるファッションコンテスト。
ロボットに衣装を着せて、そのパフォーマンス振りを競おうというもので、審査員には浅田稔大阪大学大学院教授やファッションデザイナーのコシノヒロコさん、ロボットクリエイターの高橋智隆さんらを予定している。
総合優勝ロボットには賞金50万円が贈られる。またロボットの性能を競うロボット部門の優秀ロボットには20万円、ファッション性が高いロボットにも20万円が渡されることになっている。
加味さんによると、20~30チームが参加するものとみられ「今後は船場まつりのイベントとして継続していきたい」と話している。
このほかにも、ロボット数メートルのカーペット上を歩く「ロボットパレード」や、京都大学総合人間学部講師の北原達正さんが講師を務めるパソコンで自律ロボットのプログラミングを行う「ロボット研究室」も行われる。
◆例会では、このほか6月にシンガポールで行われたロボカップ世界大会で優勝した堀川由人さん、坂本智希さんの活躍ぶりを写真を交えて紹介された。2人は、いずれも日本橋ロボット教室の出身者だという。
[第 2回船場まつり ロボット・ファッションコンテスト]
http://www.intergroup.jp/~conv/semba/
前の10件 | -

星座占い
![]()
携帯版「ロボメディア」



